|
|
Elektrische Tips - Autopilot mit Arduino - Autopilot neue Technologie
Minimalausstattung für die Funktion als Autopilot
| Neues Konzept: |
Den Weg der Einfachheit nicht verlassen, aber Möglichkeiten zur Erweiterung vorsehen, modulare Organisation, zur Vereinfachung
der Installation Kommunikation der einzelnen Module per BLE (Bluetooth Low Energy) oder WiFi, in jedem Modul eigene Intelligenz/Rechenleistung, so wenig
Datenübertragung wie möglich, um die Fehlerquote zu minimieren.
|
Hauptmodul: |
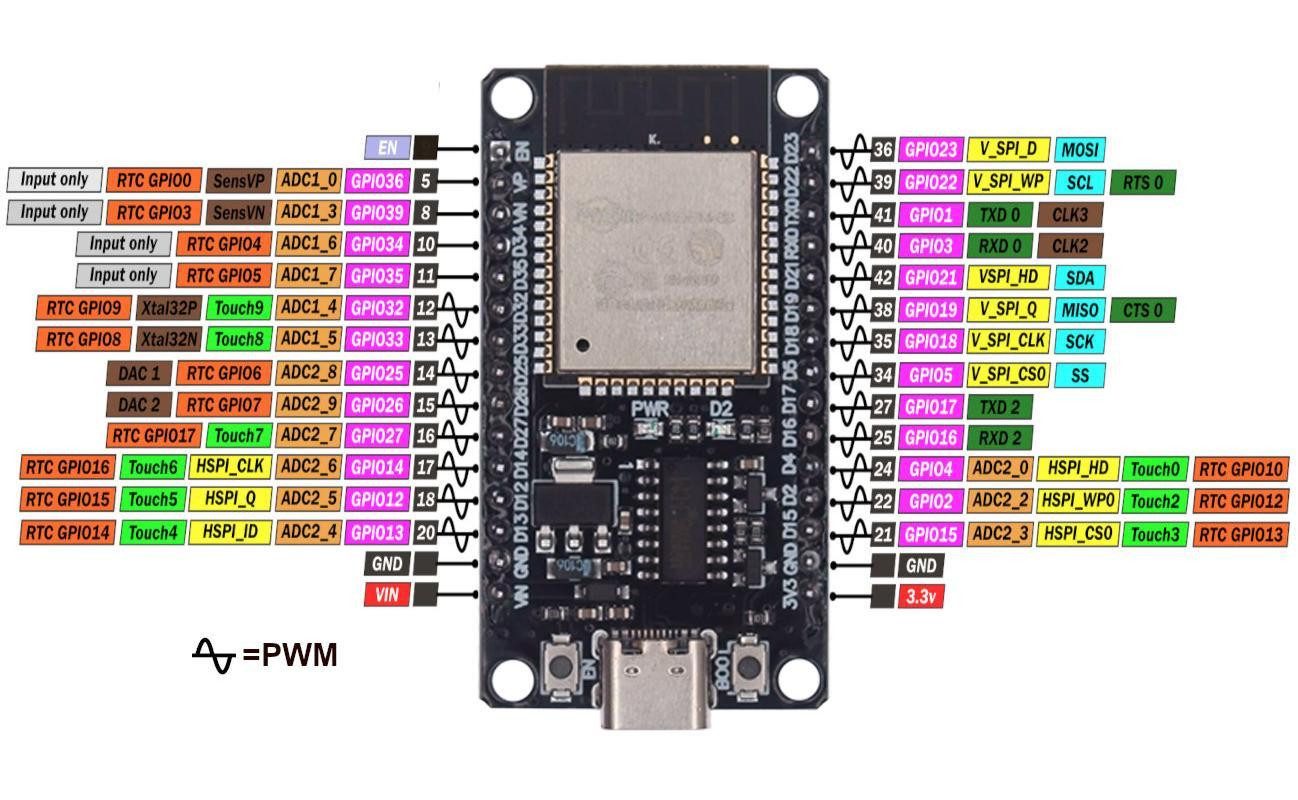
Enthält den Leistungsverstärker für die Rudermaschine und die Kupplung, speichert den Sollkurs, empfängt aktuelle
Kursdaten vom Kompaßmodul, berechnet daraus die Bewegungen der Rudermaschine, kennt die Ruderstellung per Ruderpotentiometer. Gibt
Datensätze nach außen: Sollkurs, Strom der Rudermaschine, Ruderstellung. Befehle: An (Bereitschaft), Schalter in der
Nähe der Rudermaschine. Jedoch Kupplung und Rudermaschien inaktiv, Kommunikation läuft. Rudermaschine aktiv: Schalter an
der Steuersäule, Rudermaschine und Kupplung aktiv, Rudermaschine wird entsprechend Soll/Istkurs bewegt.
|
| Kompaßmodul: |
Durch die BLE-verbindung (Bluetooth Low Energy) kann das Kompaßmodul einen größeren räumlichen Abstand vom Hauptmodul und magnetischen
Störungen haben, kann z.B. auf dem Masttopp montiert werden. Es werden nicht die Rohdaten des Sensors, sondern nur der fertig
berechnete Istkurs übertragen. Der Sensor und die Intelligenz hierzu sitzen im Kompaßmodul. Das Kompaßmodul ist in
Betrieb, solange das Bordnetz aktiv ist, es kann allenfalls separat abgeschaltet werden. Allerdings ist der Stromverbrauch vernachlässigbar
gering. Dadurch stehen die Kursdaten auch für andere Zwecke zur Verfügung, z.B. für einen Tochterkompaß.
|
Erweiterungsmöglichkeiten
| Ruderlageanzeige: |
Durch die BLE-verbindung kann die Ruderlageanzeige an einen für die Ablesbarkeit optimalen Ort plaziert werden, z.B. direkt
unter das Hardtop, dem Rudergänger direkt vor Augen. Für die Funktion muß das Hauptmodul des AP in Bereitchaft oder aktiv sein.
|
| Tochterkompaß: |
Ein (oder auch mehrere) Tochterkompaß kann an beliebigen Stellen im Schiff plaziert werden, z.B. an der Decke über der Kapitänskoje.
(muß allerdings eine Stromversorgung haben.)
|
Fernbedienung für das
Steuerruder |
Eine Fernbedienung, die neben dem Steuermodul im Wesentlichen aus einem Potentiometer besteht, kann den Steuerstand an einen angenehmeren
Ort verlegen, und zudem die Notpinne ersetzen. Wenn die Fernbedienung batteriebetrieben ist, geht das auch drahtlos-
|
|