|
||||
|
|
Schaltbild Autopilotmaxsimplex
//Autopilot Maxsimplex
// Mit Ruderlagepotentiometer
// Mit Aktivierung der Rudermaschine
// Mit Aktivierung der Kupplung
// Mit Sollkursfeststellung nach dem Reset.
// Kompass ohne Tiltkompensation angelehnt an eine Formel aus
// https://circuitdigest.com/microcontroller-projects/digital-compass-
with-arduino-and-hmc5883l-magnetometer
// mit beruhigten Werten
//**************** Funktioniert! *****************************
#include<Wire.h> // Library für den I2C-Bus
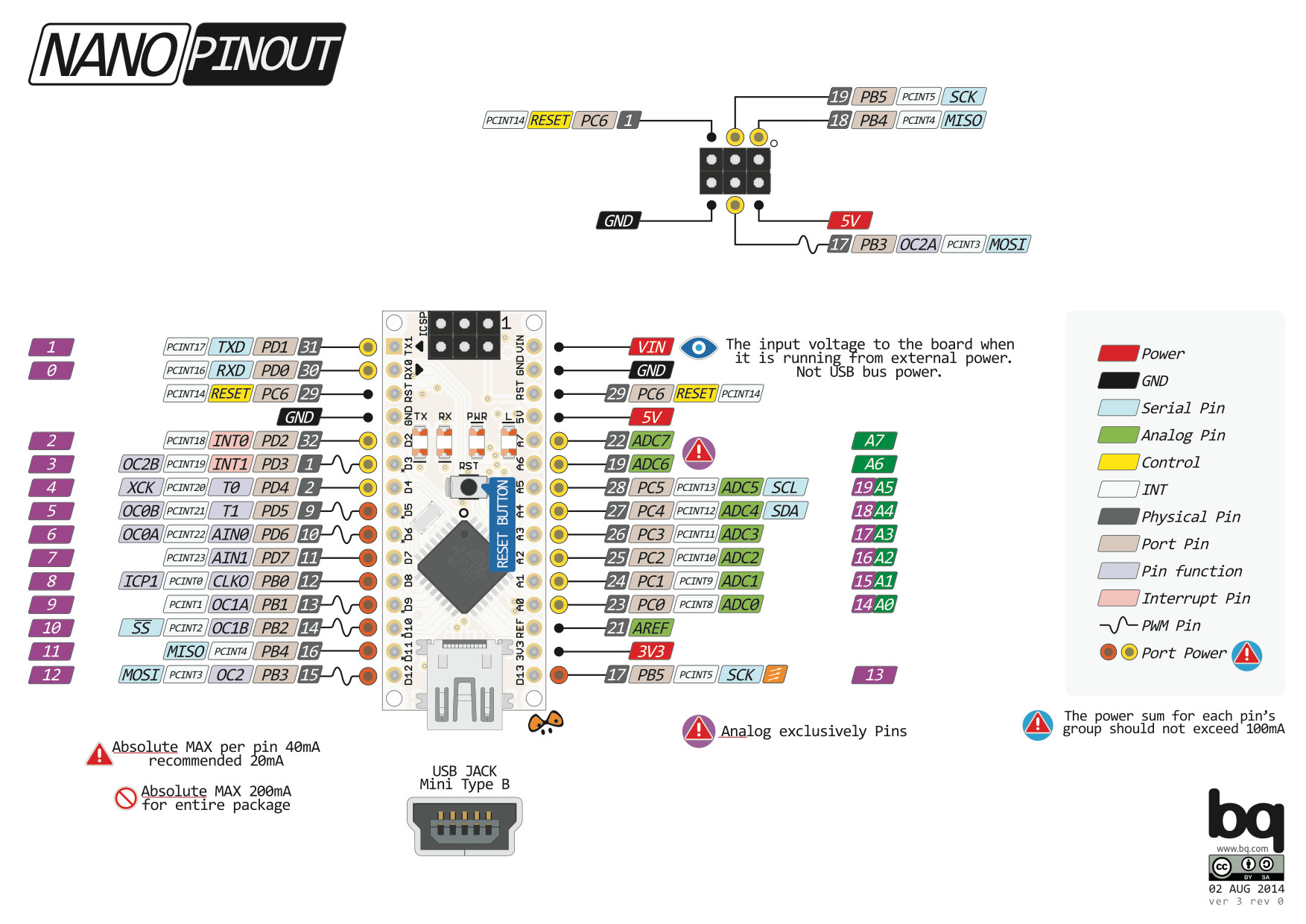
int ruderlagepin = A7; // Ruderlagepotentiometer ist mit AnIn 7 verbunden
int ruderlage = 0; // Aktuelle Ruderlage Wertebereich: 10-1000 (erreicht nicht den Anschlag)
int ruderlageMitte = 500;// Noch zu ermittelnder Wert für Ruder mittschiffs
int anschlaglinks = 1000;// Noch zu ermittelnder Wert für den Anschlag Links
int anschlagrechts = 10;// Noch zu ermittelnder Wert für den Anschlag Rechts
const int MAG=0x1E; // I2C Adresse des Magnetometers 7bit Adresse
const int MPU=0x68; // I2C address of the MPU-6050
float Sollkurs = 0; //Sollkurs ist eine Float-Zahl (mit 2 Nachkommastellen)
float Kurs = 0; // Kurs ist eine Float-Zahl (mit 2 Nachkommastellen)
int iSollkurs = 0; //Zählvariable zur Beruhigung des Sollkurs.
int Kursdifferenz; //Differenz zwischen Soll-Kurs und Ist-Kurs ist eine INT-Zahl
int16_t ax = 0; // Beschleunigung Querachse (Pitch)
int16_t ay = 0; // Beschleunigung Längsachse (Roll)
int16_t az = 0; // Beschleunigung Hochachse (Yaw)
int16_t mx = 0; // Magnetvektor Längsachse
int16_t my = 0; // Magnetvektor Querachse
int16_t mz = 0; // Magnetvektor Hochachse
int16_t tmp = 0; // Temperatur aus dem MPU
int16_t gx = 0; // Drehbeschleunigung Längsachse
int16_t gy = 0; // Drehbeschleunigung Querachse
int16_t gz = 0; // Drehbeschleunigung Hochachse
int16_t arraymx[11]; // Array zum Speichern von 10 Magnetrohwerten x für Glättung
int16_t arraymy[11]; // Array zum Speichern von 10 Magnetrohwerten y für Glättung
int16_t arraymz[11]; // Array zum Speichern von 10 Magnetrohwerten z für Glättung
int iM = 0; // Zählervariable für Magnetwert
//***********************************************************************
//Die Eingänge IN1 und IN2 des BTN7971 liegen an DO5 bzw DO10
int ENkupplung = 7; // ENable ist mit DO 7 verbunden
int IN1kupplung = 5; // IN1 ist mit DO 5 verbunden
int IN2kupplung = 10; // IN2 ist mit DO 10 verbunden
int CTkupplung = A6; // Strommessung ist mit AnIn 6 verbunden
int Kpwm = 0; // Anfangswert für das PWM-Signal, 0-255
int i = 10; // Variable für Increment
int d = 10; // Variable für Delay
//*********************************************************************
//Die Eingänge IN1 und IN2 des BTN7971 liegen an DO3 bzw DO6
int ENmotor = 8; // ENable für den Motor ist mit DO 8 verbunden
int IN1motor = 6; // IN1 für den Motor ist mit DO 6 verbunden
int IN2motor = 3; // IN2 für den Motor ist mit DO 3 verbunden
int CTmotor = A3; // Strommessung für den Motor ist mit AnIn 3 verbunden
int Mstrom = 0; // Ergebnis der Motorstrommessung
int Mpwm = 0; // Anfangswert für das Motor-PWM-Signal, 0-255
//*********************************************************************
void vorwaerts() //Rudermaschine dreht vorwärts
{
digitalWrite(ENmotor,HIGH); // für echten Betrieb auf HIGH setzen
digitalWrite(IN1motor,LOW);
analogWrite(IN2motor,Mpwm);
Mstrom = analogRead(A3);// read the input on analog pin 3:
Serial.print("Vor");
">}
//********************************************************************
void rueckwaerts() //Rudermaschine dreht rückwärts
{
digitalWrite(ENmotor,HIGH); // für echten Betrieb auf HIGH setzen
digitalWrite(IN2motor,LOW);
analogWrite(IN1motor,Mpwm);
Mstrom = analogRead(A3);// read the input on analog pin 3:
Serial.print("Rück");
}
//*********************************************************************
void berechneMpwm() // Berechnen des erforderlichen Motordrehmoments
{
Mpwm = abs (Kursdifferenz) * 10;
if (Mpwm > 255) //Verhinderung von sinnlosen Werten über 255
{
Mpwm = 255;
}
}
//*********************************************************************
void KupplungEin() // Kupplung in Eingriff bringen (Nur im Setup zu aktivieren)
{
digitalWrite(ENkupplung,HIGH);
digitalWrite(IN1kupplung,LOW);
analogWrite(IN2kupplung,255); //Voller PWM-Wert
">}
//**********************************************************************
void read_mag() // Subroutine zum Lesen der Magnetvektoren (nach erfolgter Initialisierung)
{
Wire.beginTransmission(MAG);
Wire.write(byte(0x03));
Wire.endTransmission();
Wire.requestFrom(MAG,6);
if(Wire.available()<=6)
{
mx=Wire.read()<<8;
mx|=Wire.read();
mz=Wire.read()<<8;
mz|=Wire.read();
my=Wire.read()<<8;
my|=Wire.read();
}
}
//**************************************************************************************
c">void glaetteMagnetrohwert()
{ // 1.) Array beschreiben
arraymx[iM] = mx; //Array entsprechend iM mit Magnetwert x beschreiben
arraymy[iM] = my; //Array entsprechend iM mit Magnetwert y beschreiben
arraymz[iM] = mz; //Array entsprechend iM mit Magnetwert z beschreiben
iM=iM+1; // Zeiger für den nächsten Durchlauf inkrementieren
if (iM>10)
{
iM=0; // Array voll, Zeiger zurücksetzen
}
//2.) Array lesen
mx=(arraymx[0]+arraymx[1]+arraymx[2]+arraymx[3]+arraymx[4]+arraymx[5]+
arraymx[6]+arraymx[7]+arraymx[8]+arraymx[9]+arraymx[10])/10;
//Durchschnitt aus 10 Werten
my=(arraymy[0]+arraymy[1]+arraymy[2]+arraymy[3]+arraymy[4]+arraymy[5]
+arraymy[6]+arraymy[7]+arraymy[8]+arraymy[9]+arraymy[9])/10;
//Durchschnitt aus 10 Werten
mz=(arraymz[0]+arraymz[1]+arraymz[2]+arraymz[3]+arraymz[4]+arraymz[5]
+arraymz[6]+arraymz[7]+arraymz[8]+arraymz[9]+arraymz[9])/10;
//Durchschnitt aus 10 Werten
//Nach dieser Routine sind die Kompassrohwerte mx, my, mz beruhigt
}
//***************************************************************************************
void berechneKurs()
{
Kurs = atan2(my, mx)/0.0174532925;
if(Kurs < 0)
Kurs+=360;
Kurs = 360-Kurs;
}
//***********************************************************************
void berechneKursdifferenz()
{
Kursdifferenz = Kurs - Sollkurs;
if (Kursdifferenz< -180){Kursdifferenz = Kursdifferenz + 360;}
if (Kursdifferenz> 180){Kursdifferenz = Kursdifferenz - 360;}
}
//***********************************************************************
void leseruderlage()// Ruderlage lesen und auf Anschlag testen
{
ruderlage = analogRead(ruderlagepin);
="#5e6d03">if (ruderlage >1000){digitalWrite(ENmotor,LOW);}// Motor aus
if (ruderlage <10){digitalWrite(ENmotor,LOW);}// Motor aus
}
//************************************************************************
void setup() {
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true); Wire.begin(); //Kompass
Wire.beginTransmission(MAG); // Modus continous
Wire.write(byte(0x02)); //Sendung für X MSB register Magnetometer
Wire.write(byte(0x00));
Wire.endTransmission(); // Ende der Sendung
Serial.begin(9600); // Serial Monitor initialisieren
for (iSollkurs=0; iSollkurs<11; iSollkurs ++ ) //Zählschleife zum Lesen des Sollkurses (10*)
{ read_mag();
glaetteMagnetrohwert();
berechneKurs();
Sollkurs = Kurs; //Der im Setup festgestellte Kurs ist der Sollkurs.
="#000000">}
KupplungEin(); // Kupplung in Eingriff bringen
}
void loop() {
Wire.beginTransmission(MPU);
Wire.write(0x3B); //Accel_XOUT-H
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true); // requests 6 Register (H+L pro Vektor)
ax=Wire.read()<<8|Wire.read(); //0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
ay=Wire.read()<<8|Wire.read(); //0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
az=Wire.read()<<8|Wire.read(); //0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
gx=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
gy=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
gz=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
read_mag();
glaetteMagnetrohwert();
="#000000">berechneKurs();
berechneKursdifferenz();
berechneMpwm();
if (Kursdifferenz < 0)//Entscheidung ob Rudermaschine vorwärts oder rückwärts
{
vorwaerts(); //Rudermaschine dreht vorwärts
}
else
{
rueckwaerts(); //Rudermaschine dreht rückwärts
}
Serial.print(" Kurs ");
Serial.print(Kurs);
Serial.print(" Sollkurs ");
Serial.print(Sollkurs);
Serial.print(" Kursdiff. ");
Serial.print(Kursdifferenz);
Serial.print(" Mpwm ");
Serial.print(Mpwm);
Serial.print(" Ruderlage ");
Serial.println(ruderlage);
//delay (10);
}
Sowohl die Schaltung als auch das Programm haben vorläufigen Charakter und sind nicht fehlerfrei. Man kann daher nicht erwarten,
daß ein 1:1 Nachbau sofort ohne Nacharbeit funktioniert! haltung weitgehend abgeschlossen ist, kann beim Programm eine fast unendliche Menge an Verbesserungen und Erweiterungen vorgenommen werden.
Angedacht ist, statt dem einfachen Proportionalregler einen selbstlernenden PID-Regler zu programmieren, der seine Parameter selbstständig anpaßt,
und damit Ruderbewegungen und Strom spart. Hierfür kann der Sensor auch Drehbeschleunigungen messen, die bisher gar nicht ausgewertet werden.
Schaltbild Autopilotmaxsimplex mit SHB43A |
|||
© |